Pipeline
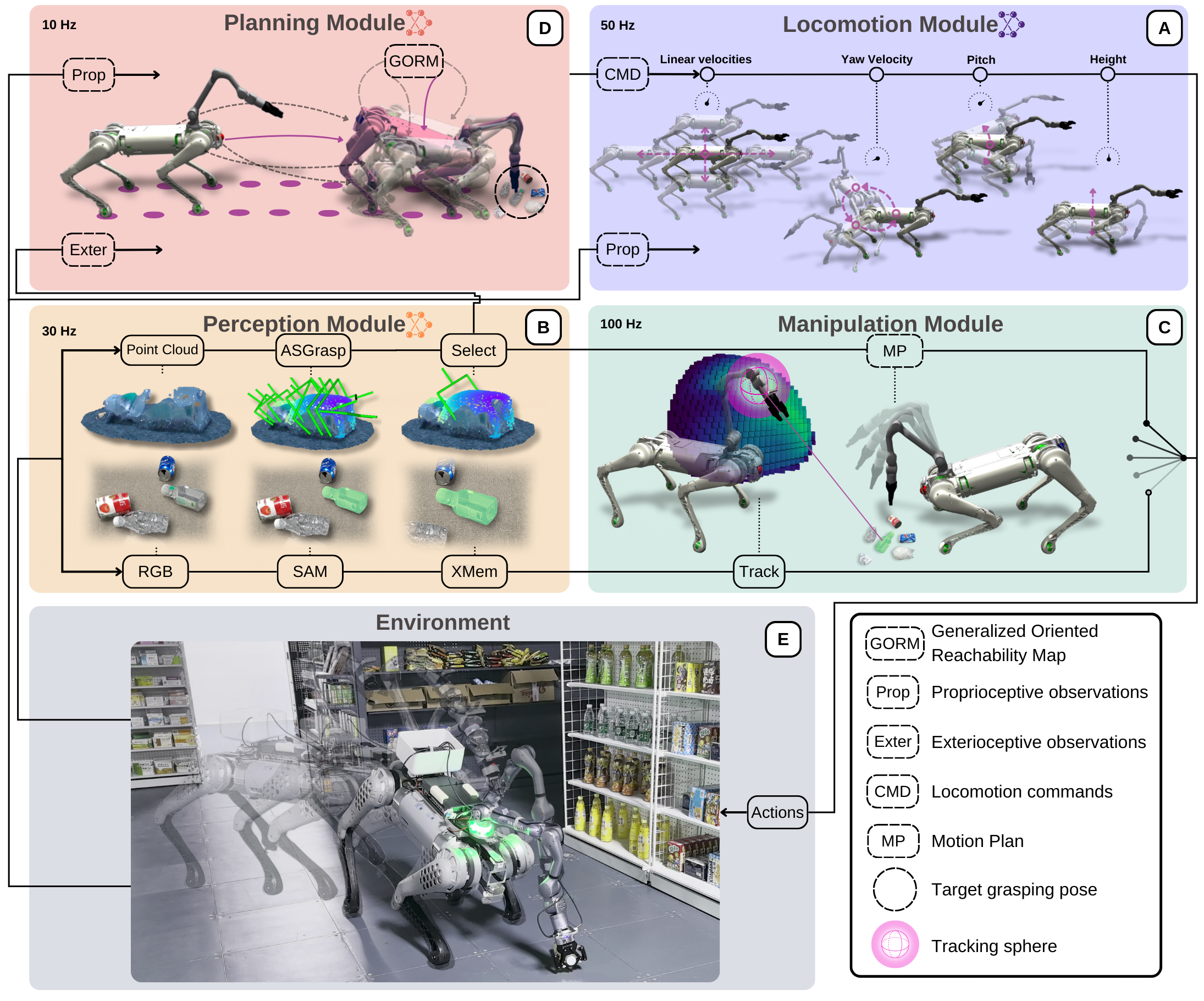
First, we train a teacher-student 5D low-level policy in simulation (A).
The perception module (B) then continuously tracks the object,
and generates grasping pose guiding manipulation module (C).
This pose is also utilized by the planning module (D) to command the locomotion policy.